Elaboration de l'algorithme de commande des moteurs
Introduction :
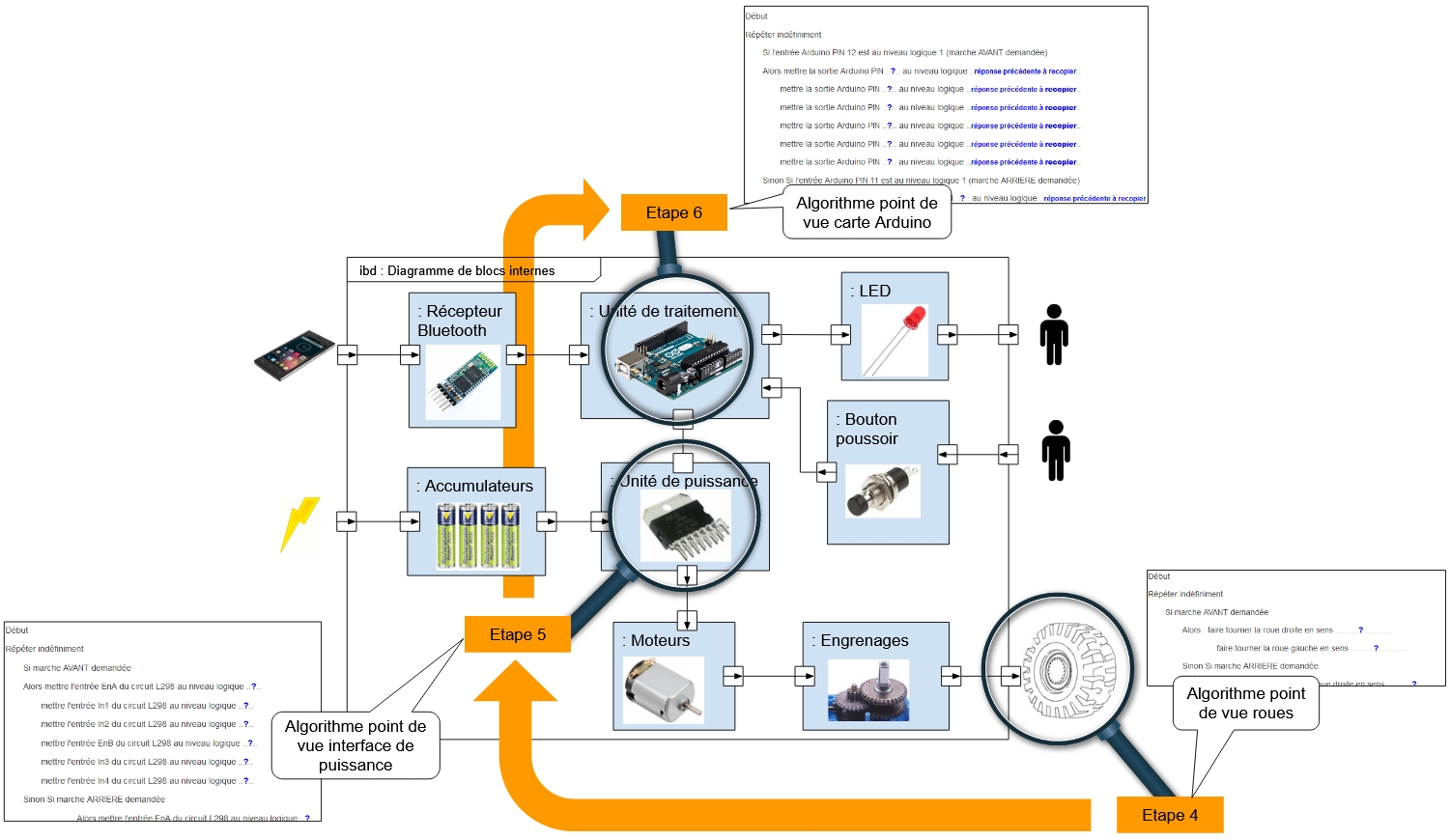
L'élaboration de l'algorithme de commande des moteurs qui doit être programmé dans la carte Arduino du robot Little BlueBot va se faire progressivement en trois étapes (les étapes 4, 5 et 6 suivantes).
Dans un premier temps (étape 4) vous allez écrire l'algorithme au niveau des roues du robot (définir le sens de rotation des roues motrices pour avancer, reculer, tourner à droite...).
Ensuite (étape 5), vous allez adapter l'algorithme précédent en vous plaçant au niveau de l'interface de puissance (définir les ordres reçus par ce "robinet d'énergie" pour qu'il envoie correctement l'énergie aux moteurs actionnant les roues).
Enfin (étape 6), vous allez adapter l'algorithme précédent en vous plaçant au niveau de la carte Arduino (définir les ordres envoyés par la carte à l'interface de puissance (robinet d'énergie)).
Cheminement de la construction de l'algorithme :