Etape 4 - Algorithme de commande des moteurs du prototype point de vue roues
En îlot
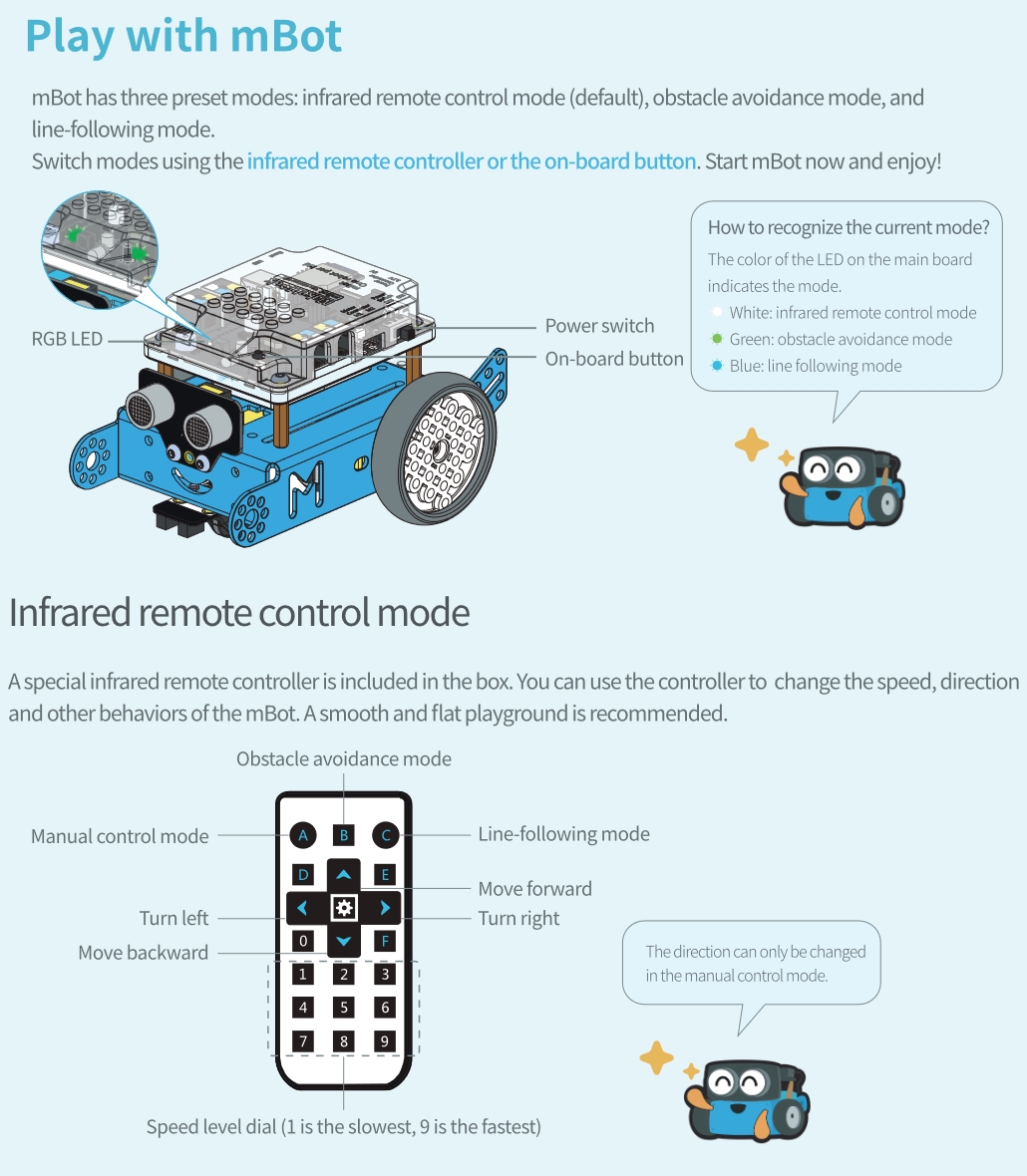
Comme il n'y a qu'un seul prototype BlueBot dans la salle, chaque îlot dispose (à demander au professeur) d'un robot de test Mbot et de sa télécommande pour effectuer les essais nécessaires à la question suivante (le robot mBot possède un fonctionnement identique à celui du prototype BlueBot). Une vérification rapide sur le prototype BlueBot sera également possible îlot par îlot.
ATTENTION manipulations raisonnées sous la responsabilité de l'élève gestionnaire. Utilisation du robot uniquement dans son parc de sécurité. Ne pas forcer la rotation des roues du robot (engrenages plastiques fragiles).
|
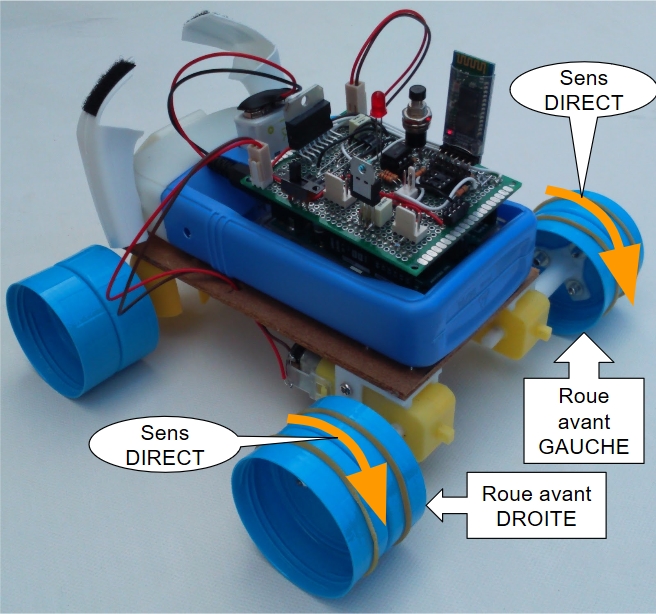
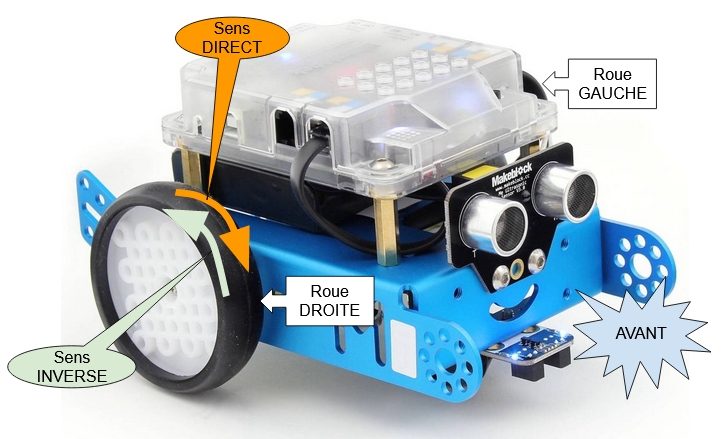
1- Faire fonctionner le robot de test Mbot de votre îlot en mode manuel (voir notice de fonctionnement donnée en ressources en bas de page > Indiquer alors dans votre document élève le mouvement (sens direct, sens inverse ou arrêt - voir précisions dans les photos ci-dessous) de chacune des deux roues motorisées Gauche et Droite pour assurer chacun des déplacement suivant : (une réponse sous forme de tableau est attendue, exemple ICI) - déplacement du prototype en avant, - déplacement du prototype en arrière, - rotation du prototype à gauche, - rotation du prototype à droite, - arrêt du prototype.
|
||||
Algorithme point de vue roues
|
||||
 |
Bonus rapidité Le Rapporteur de votre îlot doit prévenir le professeur que vous avez terminé l'étape 4. |
Ressources
Notice de fonctionnement du robot Mbot (extrait)